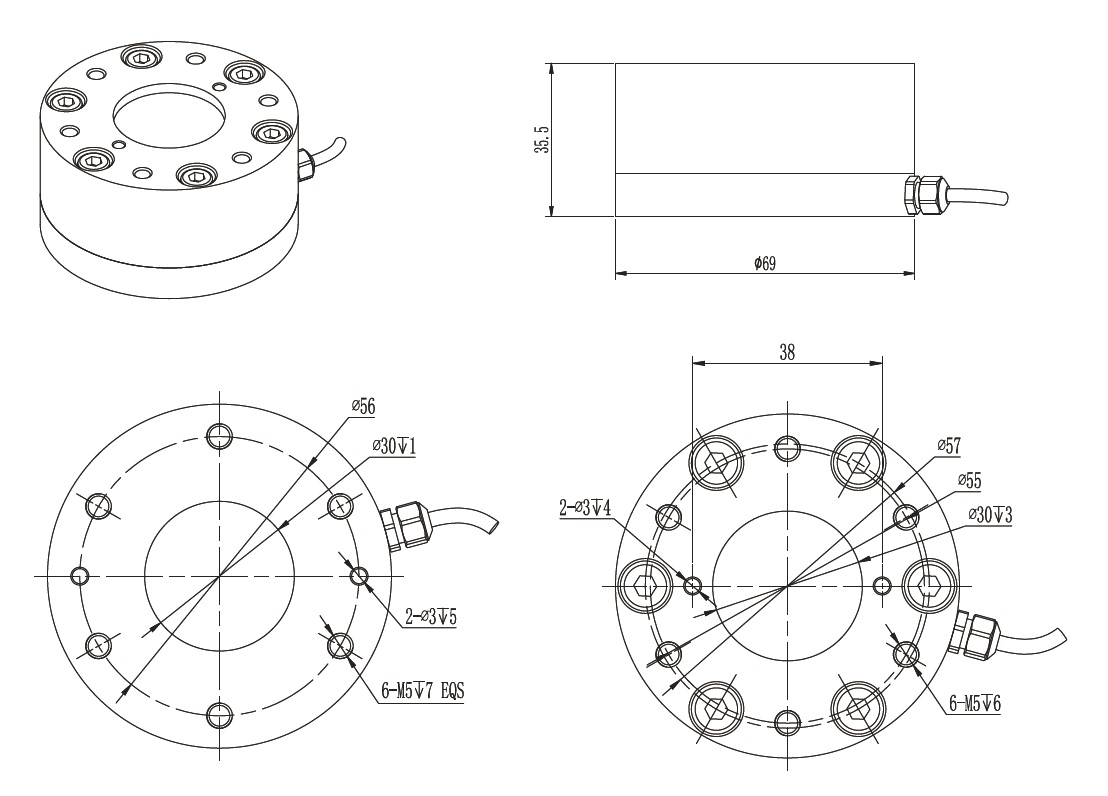
Dimensions
| Force | Unit | A1 | A2 | C1 | C2 | C3 | D1 | D2 | D3 |
| Force Fxy | N | 150 | 300 | 750 | 1000 | 1500 | 2000 | 2500 | 3000 |
| Force Fz | N | 350 | 700 | 1800 | 2400 | 3600 | 5000 | 6000 | 7350 |
Torque Mxy | N-m | 4 | 6 | 18 | 24 | 35 | 35 | 60 | 70 |
| Torque Mz | N-m | 10 | 18 | 48 | 64 | 95 | 125 | 160 | 190 |
Name | Fz Principal Component | Fx, Fy | Mx Principal Component | Mx, My |
| Accuracy (% F.S.) | 0.1 | 0.1 | 0.1 | 0.1 |
| Repetition (% F.S.) | 0.1 | 0.1 | 0.2 | 0.2 |
| Linearity (% F.S.) | 0.05 | 0.05 | 0.35 | 0.35 |
| Hysteresis (% F.S.) | 0.1 | 0.1 | 0.3 | 0.3 |
| Return to zero error (% F.S.) | 0.1 | 0.1 | 0.1 | 0.1 |
| Zero balance (% F.S.) | 0.1 | 0.1 | 0.1 | 0.1 |
Temp. effect on zero balance (TKo) (% F.S.) / 30 min | 0.1 | 0.1 | 0.1 | 0.1 |
Remarks:
1. The unit of use defaults as shown in the form above and can be changed according to customer needs
2. Ranges of different specifications can be customized according to needs;
Overload capacity reference table
Overload capacity
| Aluminum | 17-4 Stainless steel |
| Fxy | 200% | 200% |
| Fz | 200% | 200% |
| Mxy | 200% | 200% |
| Mz | 200% | 200% |
| Stiffness (calculation) | Aluminum | 17-4 Stainless steel |
| X-direction & Y-direction force (Kx, Ky) | 3.4x106 N / m | 3.4x106 N / m |
| Z direction force (Kz) | 1.3x107 N / m | 1.3x107 N / m |
| X-direction & Y-direction torque (Kmx, Kmy) | 2.7x103 N / m | 2.7x103 N / m |
| Z-direction torque (Kmz) | 1.1x104 N / m | 1.1x104 N / m |
Remarks:
1. Overload capacity and rigidity can be made according to requirements;
2. The output resolution is 0.1%. Two communication methods, EtherCAT and Ethernet, can be directly read. The sampling frequency is 1kHz.
Features and applications
High-precision six-axis force sensor, using high-quality aluminum alloy and 17-4PH stainless steel, two types of raw materials, high strength;
Parallel mechanism design, low coupling; internal digital decoupling, strong anti-interference ability, widely used in robots, automated equipment,
biomechanics, automobile crash tests and durability tests.
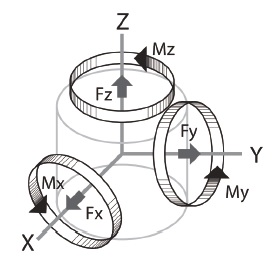
Load Direction
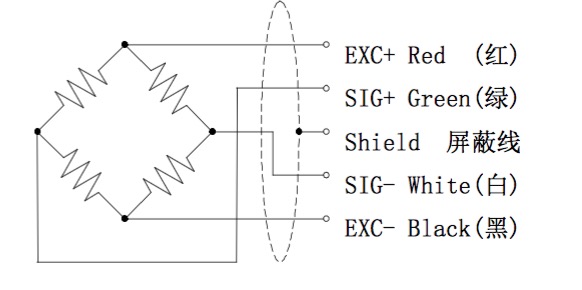
Wiring Code
Download  T521.pdf
T521.pdf














